System Description:
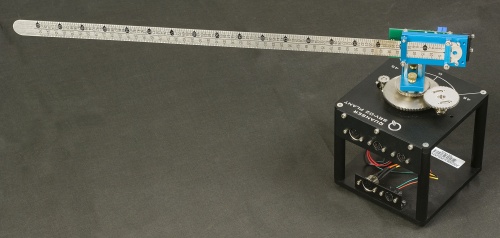
The system is composed of a single flexible link driven by a DC motor,
which is attached to the base of the link. This system is
sometimes referred to as a slewing beam. The input to the system
is a voltage to the DC motor and the output is an encoder signal.
There are actually two additional outputs: a strain gage at the base of
the flexible link to measure vibrations and a velocity sensor for the
motor for full state-feedback control.
Objective:
To develop a PID feedback controller for the system and implement that
controller in real-time on a PSoC (Programmable System-on-Chip).
Necessary Steps:
- Perform system ID using LabVIEW® for data acquisition and
generating the open-loop input signals (like swept sine).
Determine a transfer function model where the voltage to the motor is
the input and the position of the link (in degrees) is the output.
- Develop Matlab® or Python® code to process the encoder
signals and convert the A and B channel digital pulse trains to a
position signal in degrees.
- Develop a PSoC program to convert the encoder signals to an
analog output. Acquire this analog output and the encoder pulses
in LabVIEW® and verify that they agree (also verify that they are
both right by comparing with a known motion).
- Develop PSoC code to generate an open-loop sine wave and verify
the ability of your system to drive the flexible link robot.
- Design a PID controller based on your transfer function
model. Implement that controller on the PSoC.
- Predict the system response and compare this prediction
with experimental data.